Now you can download a copy of these docs so you can use them offline! Download now
AxisCamera Class Reference
#include <AxisCamera.h>
Inheritance diagram for AxisCamera:
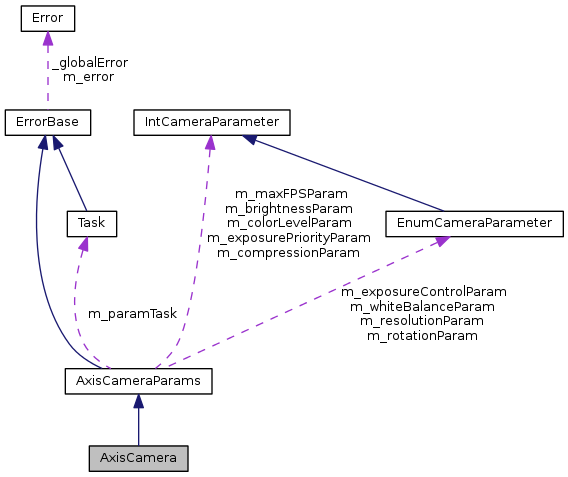
Collaboration diagram for AxisCamera:
Public Member Functions | |
| virtual | ~AxisCamera () |
| bool | IsFreshImage () |
| SEM_ID | GetNewImageSem () |
| int | GetImage (Image *imaqImage) |
| int | GetImage (ColorImage *image) |
| HSLImage * | GetImage () |
| int | CopyJPEG (char **destImage, int &destImageSize, int &destImageBufferSize) |
 Public Member Functions inherited from AxisCameraParams Public Member Functions inherited from AxisCameraParams | |
| void | WriteBrightness (int) |
| int | GetBrightness () |
| void | WriteWhiteBalance (WhiteBalance_t whiteBalance) |
| WhiteBalance_t | GetWhiteBalance () |
| void | WriteColorLevel (int) |
| int | GetColorLevel () |
| void | WriteExposureControl (Exposure_t) |
| Exposure_t | GetExposureControl () |
| void | WriteExposurePriority (int) |
| int | GetExposurePriority () |
| void | WriteMaxFPS (int) |
| int | GetMaxFPS () |
| void | WriteResolution (Resolution_t) |
| Resolution_t | GetResolution () |
| void | WriteCompression (int) |
| int | GetCompression () |
| void | WriteRotation (Rotation_t) |
| Rotation_t | GetRotation () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Static Public Member Functions | |
| static AxisCamera & | GetInstance (const char *cameraIP=NULL) |
| static void | DeleteInstance () |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
Additional Inherited Members | |
| Public Types inherited from AxisCameraParams | |
| enum | Exposure_t { kExposure_Automatic, kExposure_Hold, kExposure_FlickerFree50Hz, kExposure_FlickerFree60Hz } |
| enum | WhiteBalance_t { kWhiteBalance_Automatic, kWhiteBalance_Hold, kWhiteBalance_FixedOutdoor1, kWhiteBalance_FixedOutdoor2, kWhiteBalance_FixedIndoor, kWhiteBalance_FixedFlourescent1, kWhiteBalance_FixedFlourescent2 } |
| enum | Resolution_t { kResolution_640x480, kResolution_640x360, kResolution_320x240, kResolution_160x120 } |
| enum | Rotation_t { kRotation_0, kRotation_180 } |
|
typedef enum AxisCameraParams::Exposure_t | Exposure |
|
typedef enum AxisCameraParams::WhiteBalance_t | WhiteBalance |
|
typedef enum AxisCameraParams::Resolution_t | Resolution |
|
typedef enum AxisCameraParams::Rotation_t | Rotation |
| Protected Types inherited from AxisCameraParams | |
|
typedef std::vector < IntCameraParameter * > | ParameterVector_t |
| Protected Member Functions inherited from AxisCameraParams | |
| AxisCameraParams (const char *ipAddress) | |
| virtual | ~AxisCameraParams () |
| int | CreateCameraSocket (const char *requestString) |
| int | ParamTaskFunction () |
| int | UpdateCamParam (const char *param) |
| int | ReadCamParams () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Static Protected Member Functions inherited from AxisCameraParams | |
| static int | s_ParamTaskFunction (AxisCameraParams *thisPtr) |
| Protected Attributes inherited from AxisCameraParams | |
| Task | m_paramTask |
| uint32_t | m_ipAddress |
| SEM_ID | m_paramChangedSem |
| SEM_ID | m_socketPossessionSem |
| IntCameraParameter * | m_brightnessParam |
| IntCameraParameter * | m_compressionParam |
| IntCameraParameter * | m_exposurePriorityParam |
| IntCameraParameter * | m_colorLevelParam |
| IntCameraParameter * | m_maxFPSParam |
| EnumCameraParameter * | m_rotationParam |
| EnumCameraParameter * | m_resolutionParam |
| EnumCameraParameter * | m_exposureControlParam |
| EnumCameraParameter * | m_whiteBalanceParam |
| ParameterVector_t | m_parameters |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
AxisCamera class. This class handles everything about the Axis 206 FRC Camera. It starts up 2 tasks each using a different connection to the camera:
- image reading task that reads images repeatedly from the camera
- parameter handler task in the base class that monitors for changes to parameters and updates the camera
Definition at line 34 of file AxisCamera.h.
Constructor & Destructor Documentation
|
virtual |
Destructor
Definition at line 51 of file AxisCamera.cpp.
Member Function Documentation
| int AxisCamera::CopyJPEG | ( | char ** | destImage, |
| int & | destImageSize, | ||
| int & | destImageBufferSize | ||
| ) |
Copy an image into an existing buffer. This copies an image into an existing buffer rather than creating a new image in memory. That way a new image is only allocated when the image being copied is larger than the destination. This method is called by the PCVideoServer class.
- Parameters
-
imageData The destination image. numBytes The size of the destination image.
- Returns
- 0 if failed (no source image or no memory), 1 if success.
Definition at line 172 of file AxisCamera.cpp.
|
static |
Called by Java to delete the camera... how thoughtful
Definition at line 90 of file AxisCamera.cpp.
| int AxisCamera::GetImage | ( | Image * | imaqImage | ) |
Get an image from the camera and store it in the provided image.
- Parameters
-
image The imaq image to store the result in. This must be an HSL or RGB image This function is called by Java.
- Returns
- 1 upon success, zero on a failure
Definition at line 126 of file AxisCamera.cpp.
| int AxisCamera::GetImage | ( | ColorImage * | image | ) |
Get an image from the camera and store it in the provided image.
- Parameters
-
image The image to store the result in. This must be an HSL or RGB image
- Returns
- 1 upon success, zero on a failure
Definition at line 143 of file AxisCamera.cpp.
| HSLImage * AxisCamera::GetImage | ( | ) |
Instantiate a new image object and fill it with the latest image from the camera.
The returned pointer is owned by the caller and is their responsibility to delete.
- Returns
- a pointer to an HSLImage object
Definition at line 154 of file AxisCamera.cpp.
|
static |
Get a pointer to the AxisCamera object, if the object does not exist, create it To use the camera on port 2 of a cRIO-FRC, pass "192.168.0.90" to the first GetInstance call.
- Returns
- reference to AxisCamera object
Definition at line 75 of file AxisCamera.cpp.
| SEM_ID AxisCamera::GetNewImageSem | ( | ) |
Get the semaphore to be used to synchronize image access with camera acquisition
Call semTake on the returned semaphore to block until a new image is acquired.
The semaphore is owned by the AxisCamera class and will be deleted when the class is destroyed.
- Returns
- A semaphore to notify when new image is received
Definition at line 113 of file AxisCamera.cpp.
| bool AxisCamera::IsFreshImage | ( | ) |
Return true if the latest image from the camera has not been retrieved by calling GetImage() yet.
- Returns
- true if the image has not been retrieved yet.
Definition at line 100 of file AxisCamera.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:45 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.