Now you can download a copy of these docs so you can use them offline! Download now
InterruptableSensorBase Class Referenceabstract
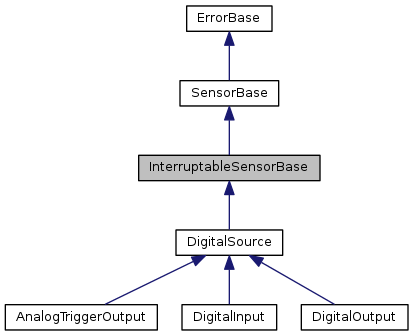
Inheritance diagram for InterruptableSensorBase:
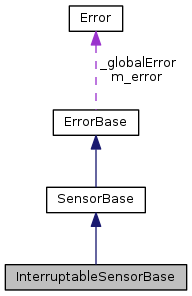
Collaboration diagram for InterruptableSensorBase:
Public Member Functions | |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param)=0 |
| Asynchronus handler version. | |
| virtual void | RequestInterrupts ()=0 |
| Synchronus Wait version. | |
| virtual void | CancelInterrupts () |
| Free up the underlying chipobject functions. More... | |
| virtual void | WaitForInterrupt (float timeout) |
| Synchronus version. More... | |
| virtual void | EnableInterrupts () |
| Enable interrupts - after finishing setup. More... | |
| virtual void | DisableInterrupts () |
| Disable, but don't deallocate. More... | |
| virtual double | ReadInterruptTimestamp () |
| Return the timestamp for the interrupt that occurred. More... | |
 Public Member Functions inherited from SensorBase Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Protected Member Functions | |
| void | AllocateInterrupts (bool watcher) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
Protected Attributes | |
| tInterrupt * | m_interrupt |
| tInterruptManager * | m_manager |
| uint32_t | m_interruptIndex |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
Definition at line 13 of file InterruptableSensorBase.h.
Member Function Documentation
|
virtual |
Free up the underlying chipobject functions.
Cancel interrupts on this device. This deallocates all the chipobject structures and disables any interrupts.
Definition at line 37 of file InterruptableSensorBase.cpp.
|
virtual |
Disable, but don't deallocate.
Disable Interrupts without without deallocating structures.
Definition at line 77 of file InterruptableSensorBase.cpp.
|
virtual |
Enable interrupts - after finishing setup.
Enable interrupts to occur on this input. Interrupts are disabled when the RequestInterrupt call is made. This gives time to do the setup of the other options before starting to field interrupts.
Definition at line 65 of file InterruptableSensorBase.cpp.
|
virtual |
Return the timestamp for the interrupt that occurred.
Return the timestamp for the interrupt that occurred most recently. This is in the same time domain as GetClock().
- Returns
- Timestamp in seconds since boot.
Definition at line 91 of file InterruptableSensorBase.cpp.
|
virtual |
Synchronus version.
In synchronous mode, wait for the defined interrupt to occur.
- Parameters
-
timeout Timeout in seconds
Definition at line 51 of file InterruptableSensorBase.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.