Now you can download a copy of these docs so you can use them offline! Download now
SimpleRobot Class Reference
#include <SimpleRobot.h>
Inheritance diagram for SimpleRobot:
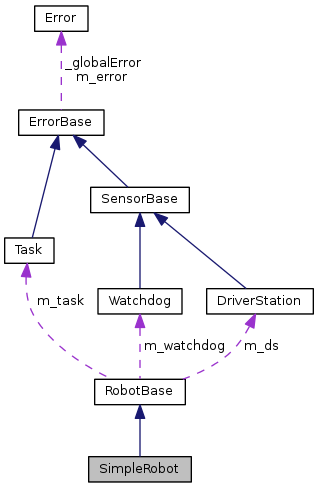
Collaboration diagram for SimpleRobot:
Public Member Functions | |
| virtual void | RobotInit () |
| virtual void | Disabled () |
| virtual void | Autonomous () |
| virtual void | OperatorControl () |
| virtual void | Test () |
| virtual void | RobotMain () |
| void | StartCompetition () |
 Public Member Functions inherited from RobotBase Public Member Functions inherited from RobotBase | |
| bool | IsEnabled () |
| bool | IsDisabled () |
| bool | IsAutonomous () |
| bool | IsOperatorControl () |
| bool | IsTest () |
| bool | IsSystemActive () |
| bool | IsNewDataAvailable () |
| Watchdog & | GetWatchdog () |
Additional Inherited Members | |
| Static Public Member Functions inherited from RobotBase | |
| static RobotBase & | getInstance () |
| static void | setInstance (RobotBase *robot) |
| static void | startRobotTask (FUNCPTR factory) |
| static void | robotTask (FUNCPTR factory, Task *task) |
| Protected Member Functions inherited from RobotBase | |
| virtual | ~RobotBase () |
| RobotBase () | |
| Static Protected Member Functions inherited from RobotBase | |
| static void | WriteVersionString () |
| Protected Attributes inherited from RobotBase | |
| Task * | m_task |
| Watchdog | m_watchdog |
| DriverStation * | m_ds |
Detailed Description
- Todo:
- If this is going to last until release, it needs a better name.
Definition at line 15 of file SimpleRobot.h.
Member Function Documentation
|
virtual |
Autonomous should go here. Programmers should override this method to run code that should run while the field is in the autonomous period. This will be called once each time the robot enters the autonomous state.
Definition at line 49 of file SimpleRobot.cpp.
|
virtual |
Disabled should go here. Programmers should override this method to run code that should run while the field is disabled.
Definition at line 38 of file SimpleRobot.cpp.
|
virtual |
Operator control (tele-operated) code should go here. Programmers should override this method to run code that should run while the field is in the Operator Control (tele-operated) period. This is called once each time the robot enters the teleop state.
Definition at line 60 of file SimpleRobot.cpp.
|
virtual |
Robot-wide initialization code should go here.
Programmers should override this method for default Robot-wide initialization which will be called each time the robot enters the disabled state.
Definition at line 28 of file SimpleRobot.cpp.
|
virtual |
Robot main program for free-form programs.
This should be overridden by user subclasses if the intent is to not use the Autonomous() and OperatorControl() methods. In that case, the program is responsible for sensing when to run the autonomous and operator control functions in their program.
This method will be called immediately after the constructor is called. If it has not been overridden by a user subclass (i.e. the default version runs), then the Autonomous() and OperatorControl() methods will be called.
Definition at line 86 of file SimpleRobot.cpp.
|
virtual |
Start a competition. This code needs to track the order of the field starting to ensure that everything happens in the right order. Repeatedly run the correct method, either Autonomous or OperatorControl or Test when the robot is enabled. After running the correct method, wait for some state to change, either the other mode starts or the robot is disabled. Then go back and wait for the robot to be enabled again.
Implements RobotBase.
Definition at line 99 of file SimpleRobot.cpp.
|
virtual |
Test program should go here. Programmers should override this method to run code that executes while the robot is in test mode. This will be called once whenever the robot enters test mode
Definition at line 70 of file SimpleRobot.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:47 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.