Now you can download a copy of these docs so you can use them offline! Download now
DoubleSolenoid Class Reference
#include <DoubleSolenoid.h>
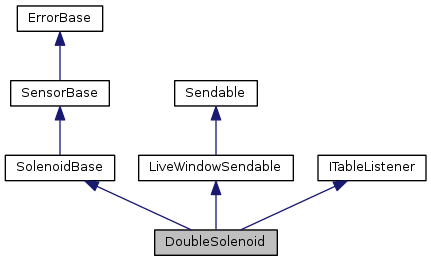
Inheritance diagram for DoubleSolenoid:
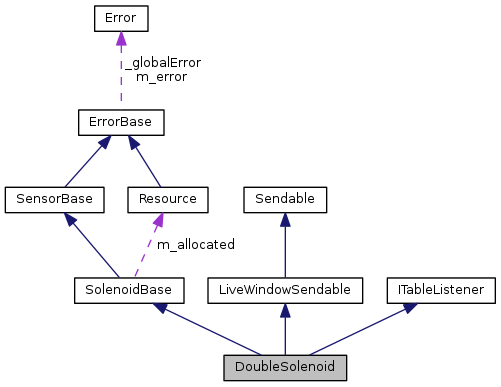
Collaboration diagram for DoubleSolenoid:
Public Types | |
| enum | Value { kOff, kForward, kReverse } |
Public Member Functions | |
| DoubleSolenoid (uint32_t forwardChannel, uint32_t reverseChannel) | |
| DoubleSolenoid (uint8_t moduleNumber, uint32_t forwardChannel, uint32_t reverseChannel) | |
| virtual | ~DoubleSolenoid () |
| virtual void | Set (Value value) |
| virtual Value | Get () |
| void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
 Public Member Functions inherited from SolenoidBase Public Member Functions inherited from SolenoidBase | |
| virtual | ~SolenoidBase () |
| uint8_t | GetAll () |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from SolenoidBase | |
| SolenoidBase (uint8_t moduleNumber) | |
| void | Set (uint8_t value, uint8_t mask) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from SolenoidBase | |
| uint32_t | m_moduleNumber |
| Slot number where the module is plugged into the chassis. | |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from SolenoidBase | |
| static Resource * | m_allocated = NULL |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
DoubleSolenoid class for running 2 channels of high voltage Digital Output (9472 module).
The DoubleSolenoid class is typically used for pneumatics solenoids that have two positions controlled by two separate channels.
Definition at line 22 of file DoubleSolenoid.h.
Constructor & Destructor Documentation
|
explicit |
Constructor.
- Parameters
-
forwardChannel The forward channel on the module to control. reverseChannel The reverse channel on the module to control.
Definition at line 66 of file DoubleSolenoid.cpp.
| DoubleSolenoid::DoubleSolenoid | ( | uint8_t | moduleNumber, |
| uint32_t | forwardChannel, | ||
| uint32_t | reverseChannel | ||
| ) |
Constructor.
- Parameters
-
moduleNumber The solenoid module (1 or 2). forwardChannel The forward channel on the module to control. reverseChannel The reverse channel on the module to control.
Definition at line 81 of file DoubleSolenoid.cpp.
|
virtual |
Destructor.
Definition at line 92 of file DoubleSolenoid.cpp.
Member Function Documentation
|
virtual |
Read the current value of the solenoid.
- Returns
- The current value of the solenoid.
Definition at line 132 of file DoubleSolenoid.cpp.
|
virtual |
- Returns
- the string representation of the named data type that will be used by the smart dashboard for this sendable
Implements Sendable.
Definition at line 172 of file DoubleSolenoid.cpp.
|
virtual |
- Returns
- the table that is currently associated with the sendable
Implements Sendable.
Definition at line 181 of file DoubleSolenoid.cpp.
|
virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implements Sendable.
Definition at line 176 of file DoubleSolenoid.cpp.
|
virtual |
Set the value of a solenoid.
- Parameters
-
value Move the solenoid to forward, reverse, or don't move it.
Definition at line 106 of file DoubleSolenoid.cpp.
|
virtual |
Start having this sendable object automatically respond to value changes reflect the value on the table.
Implements LiveWindowSendable.
Definition at line 158 of file DoubleSolenoid.cpp.
|
virtual |
Stop having this sendable object automatically respond to value changes.
Implements LiveWindowSendable.
Definition at line 165 of file DoubleSolenoid.cpp.
|
virtual |
Update the table for this sendable object with the latest values.
Implements LiveWindowSendable.
Definition at line 152 of file DoubleSolenoid.cpp.
|
virtual |
Called when a key-value pair is changed in a ITable WARNING: If a new key-value is put in this method value changed will immediatly be called which could lead to recursive code
- Parameters
-
source the table the key-value pair exists in key the key associated with the value that changed value the new value isNew true if the key did not previously exist in the table, otherwise it is false
Implements ITableListener.
Definition at line 142 of file DoubleSolenoid.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.