Now you can download a copy of these docs so you can use them offline! Download now
Sendable Class Referenceabstract
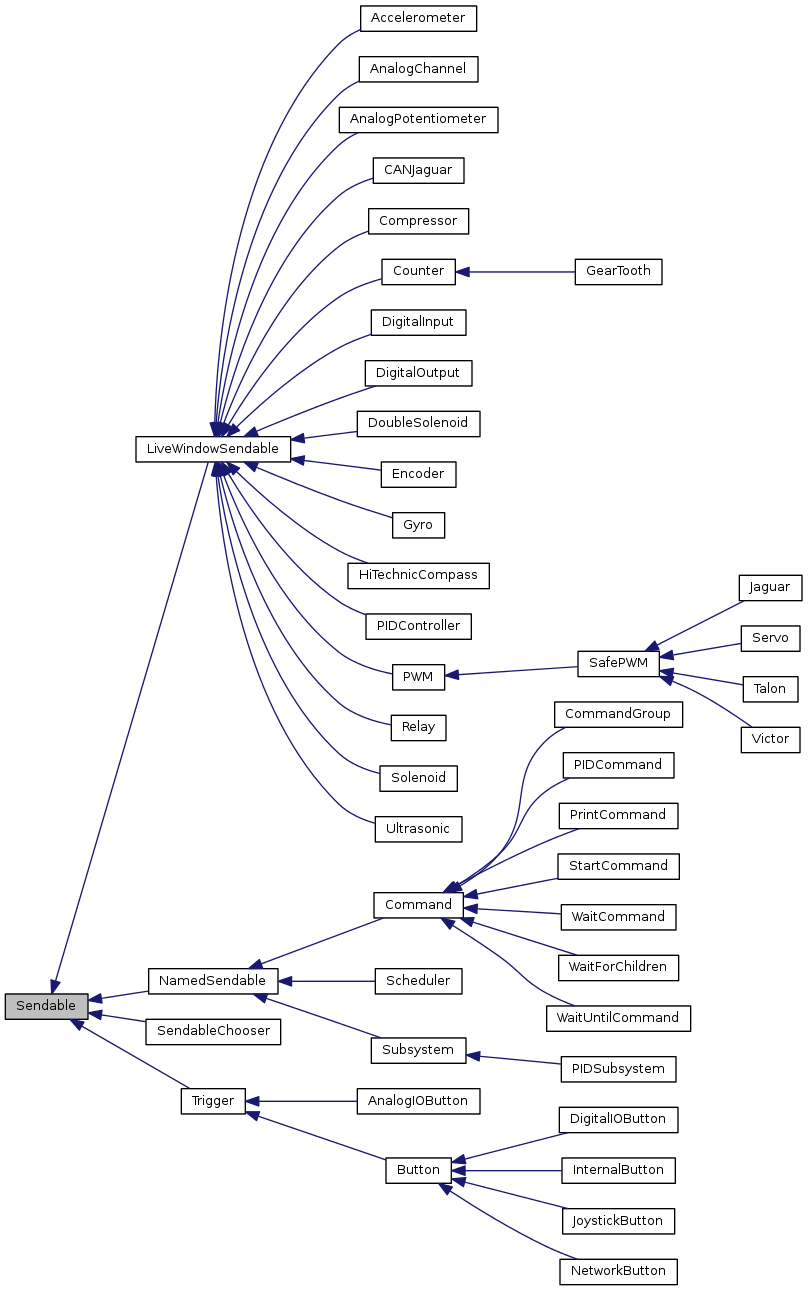
Inheritance diagram for Sendable:
Public Member Functions | |
| virtual void | InitTable (ITable *subtable)=0 |
| virtual ITable * | GetTable ()=0 |
| virtual std::string | GetSmartDashboardType ()=0 |
Detailed Description
Definition at line 13 of file Sendable.h.
Member Function Documentation
|
pure virtual |
- Returns
- the string representation of the named data type that will be used by the smart dashboard for this sendable
Implemented in Command, CANJaguar, PWM, Counter, AnalogChannel, PIDSubsystem, Encoder, Ultrasonic, Gyro, PIDCommand, DigitalOutput, Trigger, Subsystem, Compressor, DigitalInput, Relay, Scheduler, SendableChooser, HiTechnicCompass, Servo, Accelerometer, DoubleSolenoid, Solenoid, AnalogPotentiometer, and GearTooth.
|
pure virtual |
- Returns
- the table that is currently associated with the sendable
Implemented in Command, CANJaguar, PWM, Counter, AnalogChannel, Encoder, Ultrasonic, Gyro, DigitalOutput, Compressor, DigitalInput, Relay, Trigger, Subsystem, Scheduler, HiTechnicCompass, Servo, Accelerometer, DoubleSolenoid, SendableChooser, Solenoid, and AnalogPotentiometer.
|
pure virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implemented in Command, CANJaguar, PWM, Counter, AnalogChannel, PIDSubsystem, PIDController, Encoder, Ultrasonic, Gyro, PIDCommand, DigitalOutput, Compressor, DigitalInput, Relay, Trigger, Subsystem, Scheduler, HiTechnicCompass, Servo, Accelerometer, DoubleSolenoid, SendableChooser, Solenoid, and AnalogPotentiometer.
The documentation for this class was generated from the following file:
Generated on Sat Apr 26 2014 12:26:47 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.