Now you can download a copy of these docs so you can use them offline! Download now
DigitalOutput Class Reference
#include <DigitalOutput.h>
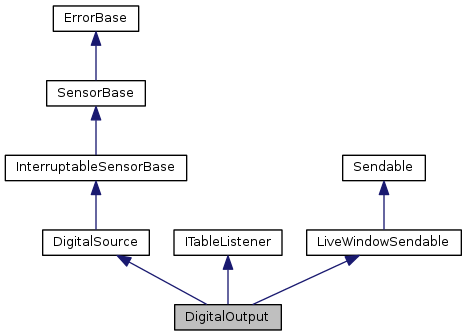
Inheritance diagram for DigitalOutput:
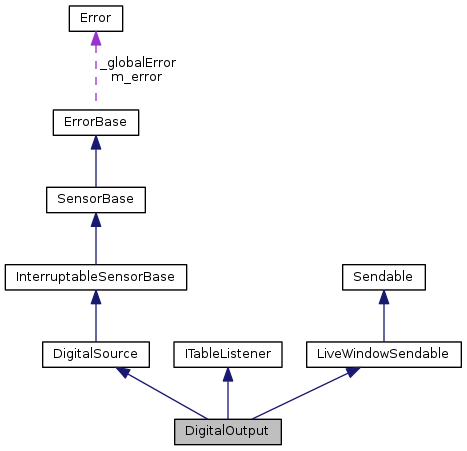
Collaboration diagram for DigitalOutput:
Public Member Functions | |
| DigitalOutput (uint32_t channel) | |
| DigitalOutput (uint8_t moduleNumber, uint32_t channel) | |
| virtual | ~DigitalOutput () |
| void | Set (uint32_t value) |
| uint32_t | GetChannel () |
| void | Pulse (float length) |
| bool | IsPulsing () |
| void | SetPWMRate (float rate) |
| void | EnablePWM (float initialDutyCycle) |
| void | DisablePWM () |
| void | UpdateDutyCycle (float dutyCycle) |
| virtual uint32_t | GetChannelForRouting () |
| virtual uint32_t | GetModuleForRouting () |
| virtual bool | GetAnalogTriggerForRouting () |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param) |
| virtual void | RequestInterrupts () |
| void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| virtual void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
 Public Member Functions inherited from DigitalSource Public Member Functions inherited from DigitalSource | |
| virtual | ~DigitalSource () |
| Public Member Functions inherited from InterruptableSensorBase | |
| virtual void | CancelInterrupts () |
| Free up the underlying chipobject functions. More... | |
| virtual void | WaitForInterrupt (float timeout) |
| Synchronus version. More... | |
| virtual void | EnableInterrupts () |
| Enable interrupts - after finishing setup. More... | |
| virtual void | DisableInterrupts () |
| Disable, but don't deallocate. More... | |
| virtual double | ReadInterruptTimestamp () |
| Return the timestamp for the interrupt that occurred. More... | |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from InterruptableSensorBase | |
| void | AllocateInterrupts (bool watcher) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from InterruptableSensorBase | |
| tInterrupt * | m_interrupt |
| tInterruptManager * | m_manager |
| uint32_t | m_interruptIndex |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
Class to write to digital outputs. Write values to the digital output channels. Other devices implemented elsewhere will allocate channels automatically so for those devices it shouldn't be done here.
Definition at line 21 of file DigitalOutput.h.
Constructor & Destructor Documentation
|
explicit |
Create an instance of a digital output. Create a digital output given a channel. The default module is used.
- Parameters
-
channel The digital channel (1..14).
Definition at line 50 of file DigitalOutput.cpp.
| DigitalOutput::DigitalOutput | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Create an instance of a digital output. Create an instance of a digital output given a module number and channel.
- Parameters
-
moduleNumber The digital module (1 or 2). channel The digital channel (1..14).
Definition at line 62 of file DigitalOutput.cpp.
|
virtual |
Free the resources associated with a digital output.
Definition at line 70 of file DigitalOutput.cpp.
Member Function Documentation
| void DigitalOutput::DisablePWM | ( | ) |
Change this line from a PWM output back to a static Digital Output line.
Free up one of the 4 DO PWM generator resources that were in use.
Definition at line 159 of file DigitalOutput.cpp.
| void DigitalOutput::EnablePWM | ( | float | initialDutyCycle | ) |
Enable a PWM Output on this line.
Allocate one of the 4 DO PWM generator resources from this module.
Supply the initial duty-cycle to output so as to avoid a glitch when first starting.
The resolution of the duty cycle is 8-bit for low frequencies (1kHz or less) but is reduced the higher the frequency of the PWM signal is.
- Parameters
-
initialDutyCycle The duty-cycle to start generating. [0..1]
Definition at line 145 of file DigitalOutput.cpp.
|
virtual |
- Returns
- The value to be written to the analog trigger field of a routing mux.
Implements DigitalSource.
Definition at line 202 of file DigitalOutput.cpp.
| uint32_t DigitalOutput::GetChannel | ( | ) |
- Returns
- The GPIO channel number that this object represents.
Definition at line 91 of file DigitalOutput.cpp.
|
virtual |
- Returns
- The value to be written to the channel field of a routing mux.
Implements DigitalSource.
Definition at line 185 of file DigitalOutput.cpp.
|
virtual |
- Returns
- The value to be written to the module field of a routing mux.
Implements DigitalSource.
Definition at line 193 of file DigitalOutput.cpp.
|
virtual |
- Returns
- the string representation of the named data type that will be used by the smart dashboard for this sendable
Implements Sendable.
Definition at line 303 of file DigitalOutput.cpp.
|
virtual |
- Returns
- the table that is currently associated with the sendable
Implements Sendable.
Definition at line 312 of file DigitalOutput.cpp.
|
virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implements Sendable.
Definition at line 307 of file DigitalOutput.cpp.
| bool DigitalOutput::IsPulsing | ( | ) |
Determine if the pulse is still going. Determine if a previously started pulse is still going.
Definition at line 112 of file DigitalOutput.cpp.
| void DigitalOutput::Pulse | ( | float | length | ) |
Output a single pulse on the digital output line. Send a single pulse on the digital output line where the pulse diration is specified in seconds. Maximum pulse length is 0.0016 seconds.
- Parameters
-
length The pulselength in seconds
Definition at line 102 of file DigitalOutput.cpp.
|
virtual |
Request interrupts asynchronously on this digital output.
- Parameters
-
handler The address of the interrupt handler function of type tInterruptHandler that will be called whenever there is an interrupt on the digitial output port. Request interrupts in synchronus mode where the user program interrupt handler will be called when an interrupt occurs. The default is interrupt on rising edges only.
Implements DigitalSource.
Definition at line 215 of file DigitalOutput.cpp.
|
virtual |
Request interrupts synchronously on this digital output. Request interrupts in synchronus mode where the user program will have to explicitly wait for the interrupt to occur. The default is interrupt on rising edges only.
Implements DigitalSource.
Definition at line 246 of file DigitalOutput.cpp.
| void DigitalOutput::Set | ( | uint32_t | value | ) |
Set the value of a digital output. Set the value of a digital output to either one (true) or zero (false).
Definition at line 82 of file DigitalOutput.cpp.
| void DigitalOutput::SetPWMRate | ( | float | rate | ) |
Change the PWM frequency of the PWM output on a Digital Output line.
The valid range is from 0.6 Hz to 19 kHz. The frequency resolution is logarithmic.
There is only one PWM frequency per digital module.
- Parameters
-
rate The frequency to output all digital output PWM signals on this module.
Definition at line 127 of file DigitalOutput.cpp.
|
virtual |
Start having this sendable object automatically respond to value changes reflect the value on the table.
Implements LiveWindowSendable.
Definition at line 291 of file DigitalOutput.cpp.
|
virtual |
Stop having this sendable object automatically respond to value changes.
Implements LiveWindowSendable.
Definition at line 297 of file DigitalOutput.cpp.
| void DigitalOutput::UpdateDutyCycle | ( | float | dutyCycle | ) |
Change the duty-cycle that is being generated on the line.
The resolution of the duty cycle is 8-bit for low frequencies (1kHz or less) but is reduced the higher the frequency of the PWM signal is.
- Parameters
-
dutyCycle The duty-cycle to change to. [0..1]
Definition at line 176 of file DigitalOutput.cpp.
|
virtual |
Update the table for this sendable object with the latest values.
Implements LiveWindowSendable.
Definition at line 288 of file DigitalOutput.cpp.
|
virtual |
Called when a key-value pair is changed in a ITable WARNING: If a new key-value is put in this method value changed will immediatly be called which could lead to recursive code
- Parameters
-
source the table the key-value pair exists in key the key associated with the value that changed value the new value isNew true if the key did not previously exist in the table, otherwise it is false
Implements ITableListener.
Definition at line 284 of file DigitalOutput.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.