Now you can download a copy of these docs so you can use them offline! Download now
DigitalSource Class Referenceabstract
#include <DigitalSource.h>
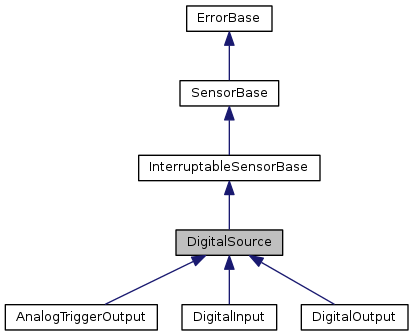
Inheritance diagram for DigitalSource:
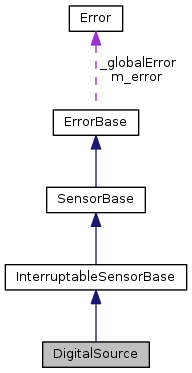
Collaboration diagram for DigitalSource:
Public Member Functions | |
| virtual | ~DigitalSource () |
| virtual uint32_t | GetChannelForRouting ()=0 |
| virtual uint32_t | GetModuleForRouting ()=0 |
| virtual bool | GetAnalogTriggerForRouting ()=0 |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param)=0 |
| Asynchronus handler version. | |
| virtual void | RequestInterrupts ()=0 |
| Synchronus Wait version. | |
 Public Member Functions inherited from InterruptableSensorBase Public Member Functions inherited from InterruptableSensorBase | |
| virtual void | CancelInterrupts () |
| Free up the underlying chipobject functions. More... | |
| virtual void | WaitForInterrupt (float timeout) |
| Synchronus version. More... | |
| virtual void | EnableInterrupts () |
| Enable interrupts - after finishing setup. More... | |
| virtual void | DisableInterrupts () |
| Disable, but don't deallocate. More... | |
| virtual double | ReadInterruptTimestamp () |
| Return the timestamp for the interrupt that occurred. More... | |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from InterruptableSensorBase | |
| void | AllocateInterrupts (bool watcher) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from InterruptableSensorBase | |
| tInterrupt * | m_interrupt |
| tInterruptManager * | m_manager |
| uint32_t | m_interruptIndex |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
DigitalSource Interface. The DigitalSource represents all the possible inputs for a counter or a quadrature encoder. The source may be either a digital input or an analog input. If the caller just provides a channel, then a digital input will be constructed and freed when finished for the source. The source can either be a digital input or analog trigger but not both.
Definition at line 19 of file DigitalSource.h.
Constructor & Destructor Documentation
|
virtual |
DigitalSource destructor.
Definition at line 12 of file DigitalSource.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.