Now you can download a copy of these docs so you can use them offline! Download now
Public Types |
Public Member Functions |
Protected Member Functions |
Protected Attributes |
Static Protected Attributes |
Friends |
List of all members
PWM Class Reference
#include <PWM.h>
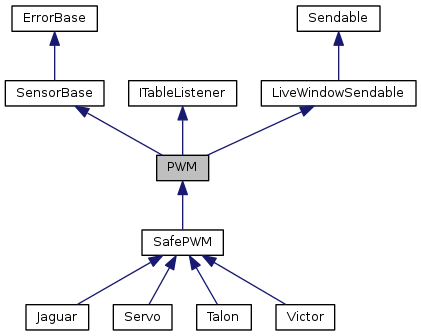
Inheritance diagram for PWM:
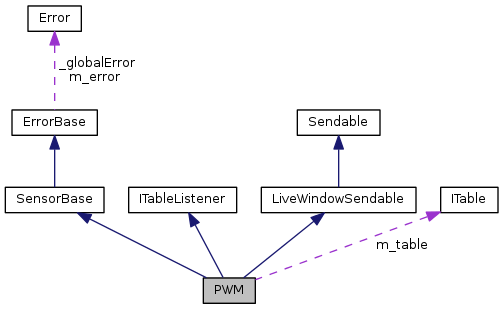
Collaboration diagram for PWM:
Public Types | |
| enum | PeriodMultiplier { kPeriodMultiplier_1X = 1, kPeriodMultiplier_2X = 2, kPeriodMultiplier_4X = 4 } |
Public Member Functions | |
| PWM (uint32_t channel) | |
| PWM (uint8_t moduleNumber, uint32_t channel) | |
| virtual | ~PWM () |
| virtual void | SetRaw (uint8_t value) |
| virtual uint8_t | GetRaw () |
| void | SetPeriodMultiplier (PeriodMultiplier mult) |
| void | EnableDeadbandElimination (bool eliminateDeadband) |
| void | SetBounds (int32_t max, int32_t deadbandMax, int32_t center, int32_t deadbandMin, int32_t min) |
| void | SetBounds (double max, double deadbandMax, double center, double deadbandMin, double min) |
| uint32_t | GetChannel () |
| uint32_t | GetModuleNumber () |
 Public Member Functions inherited from SensorBase Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Protected Member Functions | |
| virtual void | SetPosition (float pos) |
| virtual float | GetPosition () |
| virtual void | SetSpeed (float speed) |
| virtual float | GetSpeed () |
| void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
Protected Attributes | |
| bool | m_eliminateDeadband |
| int32_t | m_maxPwm |
| int32_t | m_deadbandMaxPwm |
| int32_t | m_centerPwm |
| int32_t | m_deadbandMinPwm |
| int32_t | m_minPwm |
| ITable * | m_table |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
Static Protected Attributes | |
| static constexpr float | kDefaultPwmPeriod = 5.05 |
| static constexpr float | kDefaultPwmCenter = 1.5 |
| static const int32_t | kDefaultPwmStepsDown = 128 |
| static const int32_t | kPwmDisabled = 0 |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Friends | |
| class | DigitalModule |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
Detailed Description
Class implements the PWM generation in the FPGA.
The values supplied as arguments for PWM outputs range from -1.0 to 1.0. They are mapped to the hardware dependent values, in this case 0-255 for the FPGA. Changes are immediately sent to the FPGA, and the update occurs at the next FPGA cycle. There is no delay.
As of revision 0.1.10 of the FPGA, the FPGA interprets the 0-255 values as follows:
- 255 = full "forward"
- 254 to 129 = linear scaling from "full forward" to "center"
- 128 = center value
- 127 to 2 = linear scaling from "center" to "full reverse"
- 1 = full "reverse"
- 0 = disabled (i.e. PWM output is held low)
Constructor & Destructor Documentation
|
explicit |
| PWM::PWM | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
|
virtual |
Member Function Documentation
| void PWM::EnableDeadbandElimination | ( | bool | eliminateDeadband | ) |
|
protectedvirtual |
|
virtual |
|
protectedvirtual |
|
protectedvirtual |
Get the PWM value in terms of speed.
This is intended to be used by speed controllers.
- Precondition
- SetMaxPositivePwm() called.
- SetMinPositivePwm() called.
- SetMaxNegativePwm() called.
- SetMinNegativePwm() called.
- Returns
- The most recently set speed between -1.0 and 1.0.
|
protectedvirtual |
|
protectedvirtual |
| void PWM::SetBounds | ( | int32_t | max, |
| int32_t | deadbandMax, | ||
| int32_t | center, | ||
| int32_t | deadbandMin, | ||
| int32_t | min | ||
| ) |
Set the bounds on the PWM values. This sets the bounds on the PWM values for a particular each type of controller. The values determine the upper and lower speeds as well as the deadband bracket.
- Parameters
-
max The Minimum pwm value deadbandMax The high end of the deadband range center The center speed (off) deadbandMin The low end of the deadband range min The minimum pwm value
| void PWM::SetBounds | ( | double | max, |
| double | deadbandMax, | ||
| double | center, | ||
| double | deadbandMin, | ||
| double | min | ||
| ) |
Set the bounds on the PWM pulse widths. This sets the bounds on the PWM values for a particular type of controller. The values determine the upper and lower speeds as well as the deadband bracket.
- Parameters
-
max The max PWM pulse width in ms deadbandMax The high end of the deadband range pulse width in ms center The center (off) pulse width in ms deadbandMin The low end of the deadband pulse width in ms min The minimum pulse width in ms
| void PWM::SetPeriodMultiplier | ( | PeriodMultiplier | mult | ) |
|
protectedvirtual |
|
virtual |
|
protectedvirtual |
Set the PWM value based on a speed.
This is intended to be used by speed controllers.
- Precondition
- SetMaxPositivePwm() called.
- SetMinPositivePwm() called.
- SetCenterPwm() called.
- SetMaxNegativePwm() called.
- SetMinNegativePwm() called.
- Parameters
-
speed The speed to set the speed controller between -1.0 and 1.0.
Reimplemented in SafePWM.
|
protectedvirtual |
Start having this sendable object automatically respond to value changes reflect the value on the table.
Implements LiveWindowSendable.
Reimplemented in Servo.
|
protectedvirtual |
Stop having this sendable object automatically respond to value changes.
Implements LiveWindowSendable.
Reimplemented in Servo.
|
protectedvirtual |
Update the table for this sendable object with the latest values.
Implements LiveWindowSendable.
Reimplemented in Servo.
|
protectedvirtual |
Called when a key-value pair is changed in a ITable WARNING: If a new key-value is put in this method value changed will immediatly be called which could lead to recursive code
- Parameters
-
source the table the key-value pair exists in key the key associated with the value that changed value the new value isNew true if the key did not previously exist in the table, otherwise it is false
Implements ITableListener.
Reimplemented in Servo.
Member Data Documentation
|
staticprotected |
|
staticprotected |
kDefaultPwmPeriod is in ms
- 20ms periods (50 Hz) are the "safest" setting in that this works for all devices
- 20ms periods seem to be desirable for Vex Motors
- 20ms periods are the specified period for HS-322HD servos, but work reliably down to 10.0 ms; starting at about 8.5ms, the servo sometimes hums and get hot; by 5.0ms the hum is nearly continuous
- 10ms periods work well for Victor 884
- 5ms periods allows higher update rates for Luminary Micro Jaguar speed controllers. Due to the shipping firmware on the Jaguar, we can't run the update period less than 5.05 ms.
kDefaultPwmPeriod is the 1x period (5.05 ms). In hardware, the period scaling is implemented as an output squelch to get longer periods for old devices.
|
staticprotected |
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.