Now you can download a copy of these docs so you can use them offline! Download now
Jaguar Class Reference
#include <Jaguar.h>
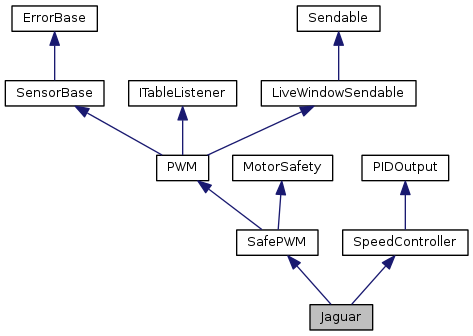
Inheritance diagram for Jaguar:
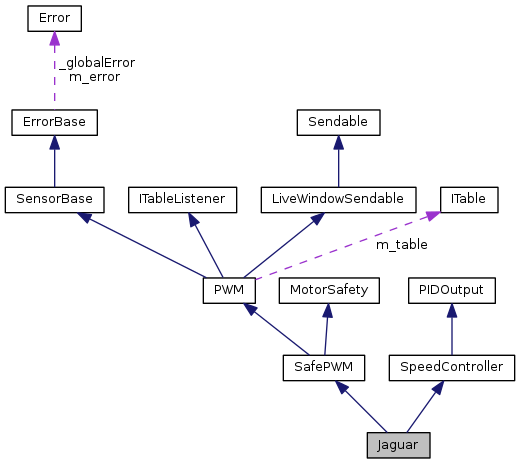
Collaboration diagram for Jaguar:
Public Member Functions | |
| Jaguar (uint32_t channel) | |
| Jaguar (uint8_t moduleNumber, uint32_t channel) | |
| virtual void | Set (float value, uint8_t syncGroup=0) |
| virtual float | Get () |
| virtual void | Disable () |
| virtual void | PIDWrite (float output) |
 Public Member Functions inherited from SafePWM Public Member Functions inherited from SafePWM | |
| SafePWM (uint32_t channel) | |
| SafePWM (uint8_t moduleNumber, uint32_t channel) | |
| void | SetExpiration (float timeout) |
| float | GetExpiration () |
| bool | IsAlive () |
| void | StopMotor () |
| bool | IsSafetyEnabled () |
| void | SetSafetyEnabled (bool enabled) |
| void | GetDescription (char *desc) |
| virtual void | SetSpeed (float speed) |
| Public Member Functions inherited from PWM | |
| PWM (uint32_t channel) | |
| PWM (uint8_t moduleNumber, uint32_t channel) | |
| virtual | ~PWM () |
| virtual void | SetRaw (uint8_t value) |
| virtual uint8_t | GetRaw () |
| void | SetPeriodMultiplier (PeriodMultiplier mult) |
| void | EnableDeadbandElimination (bool eliminateDeadband) |
| void | SetBounds (int32_t max, int32_t deadbandMax, int32_t center, int32_t deadbandMin, int32_t min) |
| void | SetBounds (double max, double deadbandMax, double center, double deadbandMin, double min) |
| uint32_t | GetChannel () |
| uint32_t | GetModuleNumber () |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Public Types inherited from PWM | |
| enum | PeriodMultiplier { kPeriodMultiplier_1X = 1, kPeriodMultiplier_2X = 2, kPeriodMultiplier_4X = 4 } |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from PWM | |
| virtual void | SetPosition (float pos) |
| virtual float | GetPosition () |
| virtual float | GetSpeed () |
| void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from PWM | |
| bool | m_eliminateDeadband |
| int32_t | m_maxPwm |
| int32_t | m_deadbandMaxPwm |
| int32_t | m_centerPwm |
| int32_t | m_deadbandMinPwm |
| int32_t | m_minPwm |
| ITable * | m_table |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from PWM | |
| static constexpr float | kDefaultPwmPeriod = 5.05 |
| static constexpr float | kDefaultPwmCenter = 1.5 |
| static const int32_t | kDefaultPwmStepsDown = 128 |
| static const int32_t | kPwmDisabled = 0 |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
Constructor & Destructor Documentation
|
explicit |
Constructor that assumes the default digital module.
Definition at line 40 of file Jaguar.cpp.
| Jaguar::Jaguar | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Constructor that specifies the digital module.
- Parameters
-
moduleNumber The digital module (1 or 2). channel The PWM channel on the digital module that the Jaguar is attached to.
Definition at line 51 of file Jaguar.cpp.
Member Function Documentation
|
virtual |
Common interface for disabling a motor.
Implements SpeedController.
Definition at line 87 of file Jaguar.cpp.
|
virtual |
Get the recently set value of the PWM.
- Returns
- The most recently set value for the PWM between -1.0 and 1.0.
Implements SpeedController.
Definition at line 79 of file Jaguar.cpp.
|
virtual |
Write out the PID value as seen in the PIDOutput base object.
- Parameters
-
output Write out the PWM value as was found in the PIDController
Implements PIDOutput.
Definition at line 97 of file Jaguar.cpp.
|
virtual |
Set the PWM value.
The PWM value is set using a range of -1.0 to 1.0, appropriately scaling the value for the FPGA.
- Parameters
-
speed The speed value between -1.0 and 1.0 to set. syncGroup Unused interface.
Implements SpeedController.
Definition at line 69 of file Jaguar.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.