Now you can download a copy of these docs so you can use them offline! Download now
SpeedController Class Referenceabstract
#include <SpeedController.h>
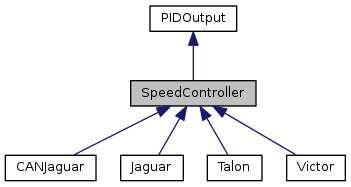
Inheritance diagram for SpeedController:
Collaboration diagram for SpeedController:
Public Member Functions | |
| virtual void | Set (float speed, uint8_t syncGroup=0)=0 |
| virtual float | Get ()=0 |
| virtual void | Disable ()=0 |
 Public Member Functions inherited from PIDOutput Public Member Functions inherited from PIDOutput | |
| virtual void | PIDWrite (float output)=0 |
Detailed Description
Interface for speed controlling devices.
Definition at line 16 of file SpeedController.h.
Member Function Documentation
|
pure virtual |
|
pure virtual |
|
pure virtual |
The documentation for this class was generated from the following file:
Generated on Sat Apr 26 2014 12:26:47 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.