Now you can download a copy of these docs so you can use them offline! Download now
PIDController Class Reference
#include <PIDController.h>
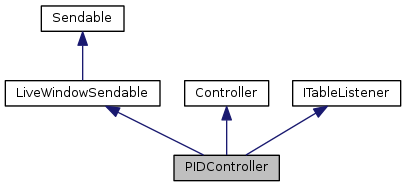
Inheritance diagram for PIDController:
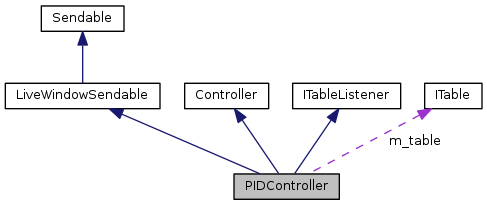
Collaboration diagram for PIDController:
Public Member Functions | |
| PIDController (float p, float i, float d, PIDSource *source, PIDOutput *output, float period=0.05) | |
| PIDController (float p, float i, float d, float f, PIDSource *source, PIDOutput *output, float period=0.05) | |
| virtual | ~PIDController () |
| virtual float | Get () |
| virtual void | SetContinuous (bool continuous=true) |
| virtual void | SetInputRange (float minimumInput, float maximumInput) |
| virtual void | SetOutputRange (float mimimumOutput, float maximumOutput) |
| virtual void | SetPID (float p, float i, float d) |
| virtual void | SetPID (float p, float i, float d, float f) |
| virtual float | GetP () |
| virtual float | GetI () |
| virtual float | GetD () |
| virtual float | GetF () |
| virtual void | SetSetpoint (float setpoint) |
| virtual float | GetSetpoint () |
| virtual float | GetError () |
| virtual void | SetTolerance (float percent) |
| virtual void | SetAbsoluteTolerance (float absValue) |
| virtual void | SetPercentTolerance (float percentValue) |
| virtual bool | OnTarget () |
| virtual void | Enable () |
| virtual void | Disable () |
| virtual bool | IsEnabled () |
| virtual void | Reset () |
| virtual void | InitTable (ITable *table) |
Protected Member Functions | |
| void | Calculate () |
| DISALLOW_COPY_AND_ASSIGN (PIDController) | |
Protected Attributes | |
| ITable * | m_table |
Detailed Description
Class implements a PID Control Loop.
Creates a separate thread which reads the given PIDSource and takes care of the integral calculations, as well as writing the given PIDOutput
Definition at line 26 of file PIDController.h.
Constructor & Destructor Documentation
| PIDController::PIDController | ( | float | Kp, |
| float | Ki, | ||
| float | Kd, | ||
| PIDSource * | source, | ||
| PIDOutput * | output, | ||
| float | period = 0.05 |
||
| ) |
Allocate a PID object with the given constants for P, I, D
- Parameters
-
Kp the proportional coefficient Ki the integral coefficient Kd the derivative coefficient source The PIDSource object that is used to get values output The PIDOutput object that is set to the output value period the loop time for doing calculations. This particularly effects calculations of the integral and differental terms. The default is 50ms.
Definition at line 33 of file PIDController.cpp.
| PIDController::PIDController | ( | float | Kp, |
| float | Ki, | ||
| float | Kd, | ||
| float | Kf, | ||
| PIDSource * | source, | ||
| PIDOutput * | output, | ||
| float | period = 0.05 |
||
| ) |
Allocate a PID object with the given constants for P, I, D
- Parameters
-
Kp the proportional coefficient Ki the integral coefficient Kd the derivative coefficient source The PIDSource object that is used to get values output The PIDOutput object that is set to the output value period the loop time for doing calculations. This particularly effects calculations of the integral and differental terms. The default is 50ms.
Definition at line 51 of file PIDController.cpp.
|
virtual |
Free the PID object
Definition at line 107 of file PIDController.cpp.
Member Function Documentation
|
protected |
Read the input, calculate the output accordingly, and write to the output. This should only be called by the Notifier indirectly through CallCalculate and is created during initialization.
Definition at line 131 of file PIDController.cpp.
|
virtual |
Stop running the PIDController, this sets the output to zero before stopping.
Implements Controller.
Definition at line 520 of file PIDController.cpp.
|
virtual |
Begin running the PIDController
Implements Controller.
Definition at line 504 of file PIDController.cpp.
|
virtual |
Return the current PID result This is always centered on zero and constrained the the max and min outs
- Returns
- the latest calculated output
Definition at line 307 of file PIDController.cpp.
|
virtual |
Get the Differential coefficient
- Returns
- differential coefficient
Definition at line 280 of file PIDController.cpp.
|
virtual |
Retruns the current difference of the input from the setpoint
- Returns
- the current error
Definition at line 417 of file PIDController.cpp.
|
virtual |
Get the Feed forward coefficient
- Returns
- Feed forward coefficient
Definition at line 293 of file PIDController.cpp.
|
virtual |
Get the Integral coefficient
- Returns
- integral coefficient
Definition at line 267 of file PIDController.cpp.
|
virtual |
Get the Proportional coefficient
- Returns
- proportional coefficient
Definition at line 254 of file PIDController.cpp.
|
virtual |
Returns the current setpoint of the PIDController
- Returns
- the current setpoint
Definition at line 402 of file PIDController.cpp.
|
virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implements Sendable.
Definition at line 568 of file PIDController.cpp.
|
virtual |
Return true if PIDController is enabled.
Definition at line 537 of file PIDController.cpp.
|
virtual |
Reset the previous error,, the integral term, and disable the controller.
Definition at line 551 of file PIDController.cpp.
|
virtual |
Set the PID controller to consider the input to be continuous, Rather then using the max and min in as constraints, it considers them to be the same point and automatically calculates the shortest route to the setpoint.
- Parameters
-
continuous Set to true turns on continuous, false turns off continuous
Definition at line 325 of file PIDController.cpp.
|
virtual |
Sets the maximum and minimum values expected from the input.
- Parameters
-
minimumInput the minimum value expected from the input maximumInput the maximum value expected from the output
Definition at line 341 of file PIDController.cpp.
|
virtual |
Sets the minimum and maximum values to write.
- Parameters
-
minimumOutput the minimum value to write to the output maximumOutput the maximum value to write to the output
Definition at line 359 of file PIDController.cpp.
|
virtual |
Set the PID Controller gain parameters. Set the proportional, integral, and differential coefficients.
- Parameters
-
p Proportional coefficient i Integral coefficient d Differential coefficient
Definition at line 206 of file PIDController.cpp.
|
virtual |
Set the PID Controller gain parameters. Set the proportional, integral, and differential coefficients.
- Parameters
-
p Proportional coefficient i Integral coefficient d Differential coefficient f Feed forward coefficient
Definition at line 231 of file PIDController.cpp.
|
virtual |
Set the setpoint for the PIDController
- Parameters
-
setpoint the desired setpoint
Definition at line 373 of file PIDController.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.