Now you can download a copy of these docs so you can use them offline! Download now
DigitalInput Class Reference
#include <DigitalInput.h>
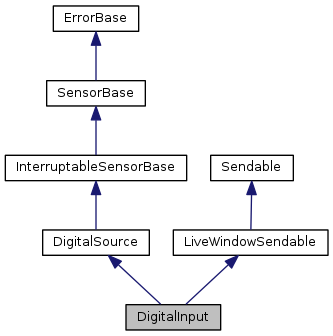
Inheritance diagram for DigitalInput:
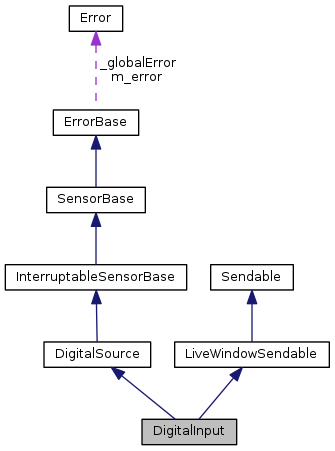
Collaboration diagram for DigitalInput:
Public Member Functions | |
| DigitalInput (uint32_t channel) | |
| DigitalInput (uint8_t moduleNumber, uint32_t channel) | |
| virtual | ~DigitalInput () |
| uint32_t | Get () |
| uint32_t | GetChannel () |
| virtual uint32_t | GetChannelForRouting () |
| virtual uint32_t | GetModuleForRouting () |
| virtual bool | GetAnalogTriggerForRouting () |
| virtual void | RequestInterrupts (tInterruptHandler handler, void *param=NULL) |
| Asynchronus handler version. More... | |
| virtual void | RequestInterrupts () |
| Synchronus Wait version. More... | |
| void | SetUpSourceEdge (bool risingEdge, bool fallingEdge) |
| void | UpdateTable () |
| void | StartLiveWindowMode () |
| void | StopLiveWindowMode () |
| std::string | GetSmartDashboardType () |
| void | InitTable (ITable *subTable) |
| ITable * | GetTable () |
 Public Member Functions inherited from DigitalSource Public Member Functions inherited from DigitalSource | |
| virtual | ~DigitalSource () |
| Public Member Functions inherited from InterruptableSensorBase | |
| virtual void | CancelInterrupts () |
| Free up the underlying chipobject functions. More... | |
| virtual void | WaitForInterrupt (float timeout) |
| Synchronus version. More... | |
| virtual void | EnableInterrupts () |
| Enable interrupts - after finishing setup. More... | |
| virtual void | DisableInterrupts () |
| Disable, but don't deallocate. More... | |
| virtual double | ReadInterruptTimestamp () |
| Return the timestamp for the interrupt that occurred. More... | |
| Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
| Protected Member Functions inherited from InterruptableSensorBase | |
| void | AllocateInterrupts (bool watcher) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
| Protected Attributes inherited from InterruptableSensorBase | |
| tInterrupt * | m_interrupt |
| tInterruptManager * | m_manager |
| uint32_t | m_interruptIndex |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
Class to read a digital input. This class will read digital inputs and return the current value on the channel. Other devices such as encoders, gear tooth sensors, etc. that are implemented elsewhere will automatically allocate digital inputs and outputs as required. This class is only for devices like switches etc. that aren't implemented anywhere else.
Definition at line 22 of file DigitalInput.h.
Constructor & Destructor Documentation
|
explicit |
Create an instance of a Digital Input class. Creates a digital input given a channel and uses the default module.
- Parameters
-
channel The digital channel (1..14).
Definition at line 51 of file DigitalInput.cpp.
| DigitalInput::DigitalInput | ( | uint8_t | moduleNumber, |
| uint32_t | channel | ||
| ) |
Create an instance of a Digital Input class. Creates a digital input given an channel and module.
- Parameters
-
moduleNumber The digital module (1 or 2). channel The digital channel (1..14).
Definition at line 63 of file DigitalInput.cpp.
|
virtual |
Free resources associated with the Digital Input class.
Definition at line 71 of file DigitalInput.cpp.
Member Function Documentation
|
virtual |
- Returns
- The value to be written to the analog trigger field of a routing mux.
Implements DigitalSource.
Definition at line 121 of file DigitalInput.cpp.
| uint32_t DigitalInput::GetChannel | ( | ) |
- Returns
- The GPIO channel number that this object represents.
Definition at line 96 of file DigitalInput.cpp.
|
virtual |
- Returns
- The value to be written to the channel field of a routing mux.
Implements DigitalSource.
Definition at line 104 of file DigitalInput.cpp.
|
virtual |
- Returns
- The value to be written to the module field of a routing mux.
Implements DigitalSource.
Definition at line 112 of file DigitalInput.cpp.
|
virtual |
- Returns
- the string representation of the named data type that will be used by the smart dashboard for this sendable
Implements Sendable.
Definition at line 217 of file DigitalInput.cpp.
|
virtual |
- Returns
- the table that is currently associated with the sendable
Implements Sendable.
Definition at line 226 of file DigitalInput.cpp.
|
virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implements Sendable.
Definition at line 221 of file DigitalInput.cpp.
|
virtual |
Asynchronus handler version.
Request interrupts asynchronously on this digital input.
- Parameters
-
handler The address of the interrupt handler function of type tInterruptHandler that will be called whenever there is an interrupt on the digitial input port. Request interrupts in synchronus mode where the user program interrupt handler will be called when an interrupt occurs. The default is interrupt on rising edges only.
Implements DigitalSource.
Definition at line 134 of file DigitalInput.cpp.
|
virtual |
Synchronus Wait version.
Request interrupts synchronously on this digital input. Request interrupts in synchronus mode where the user program will have to explicitly wait for the interrupt to occur. The default is interrupt on rising edges only.
Implements DigitalSource.
Definition at line 165 of file DigitalInput.cpp.
|
virtual |
Start having this sendable object automatically respond to value changes reflect the value on the table.
Implements LiveWindowSendable.
Definition at line 209 of file DigitalInput.cpp.
|
virtual |
Stop having this sendable object automatically respond to value changes.
Implements LiveWindowSendable.
Definition at line 213 of file DigitalInput.cpp.
|
virtual |
Update the table for this sendable object with the latest values.
Implements LiveWindowSendable.
Definition at line 203 of file DigitalInput.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:46 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.