Now you can download a copy of these docs so you can use them offline! Download now
Trigger Class Referenceabstract
#include <Trigger.h>
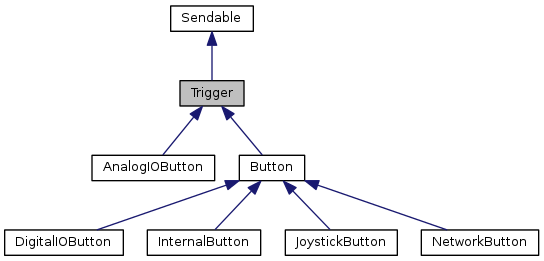
Inheritance diagram for Trigger:
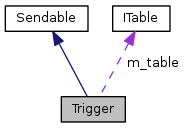
Collaboration diagram for Trigger:
Public Member Functions | |
| bool | Grab () |
| virtual bool | Get ()=0 |
| void | WhenActive (Command *command) |
| void | WhileActive (Command *command) |
| void | WhenInactive (Command *command) |
| void | CancelWhenActive (Command *command) |
| void | ToggleWhenActive (Command *command) |
| virtual void | InitTable (ITable *table) |
| virtual ITable * | GetTable () |
| virtual std::string | GetSmartDashboardType () |
Protected Attributes | |
| ITable * | m_table |
Detailed Description
This class provides an easy way to link commands to inputs.
It is very easy to link a polled input to a command. For instance, you could link the trigger button of a joystick to a "score" command or an encoder reaching a particular value.
It is encouraged that teams write a subclass of Trigger if they want to have something unusual (for instance, if they want to react to the user holding a button while the robot is reading a certain sensor input). For this, they only have to write the Trigger#Get() method to get the full functionality of the Trigger class.
Member Function Documentation
|
virtual |
- Returns
- the string representation of the named data type that will be used by the smart dashboard for this sendable
Implements Sendable.
Definition at line 62 of file Trigger.cpp.
|
virtual |
- Returns
- the table that is currently associated with the sendable
Implements Sendable.
Definition at line 73 of file Trigger.cpp.
|
virtual |
Initializes a table for this sendable object.
- Parameters
-
subtable The table to put the values in.
Implements Sendable.
Definition at line 66 of file Trigger.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:47 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.