Now you can download a copy of these docs so you can use them offline! Download now
WaitForChildren Class Reference
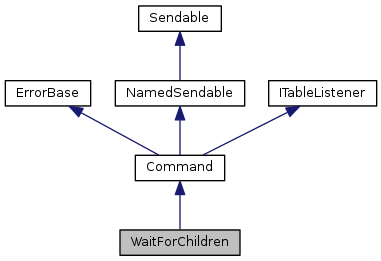
Inheritance diagram for WaitForChildren:
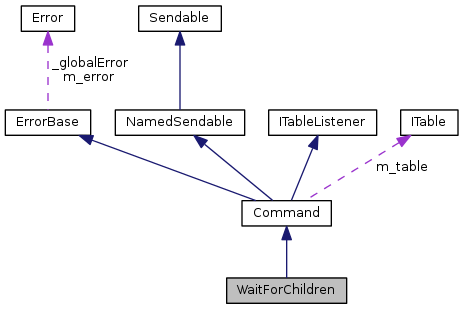
Collaboration diagram for WaitForChildren:
Public Member Functions | |
| WaitForChildren (double timeout) | |
| WaitForChildren (const char *name, double timeout) | |
 Public Member Functions inherited from Command Public Member Functions inherited from Command | |
| Command () | |
| Command (const char *name) | |
| Command (double timeout) | |
| Command (const char *name, double timeout) | |
| double | TimeSinceInitialized () |
| void | Requires (Subsystem *s) |
| bool | IsCanceled () |
| void | Start () |
| bool | Run () |
| void | Cancel () |
| bool | IsRunning () |
| bool | IsInterruptible () |
| void | SetInterruptible (bool interruptible) |
| bool | DoesRequire (Subsystem *subsystem) |
| SubsystemSet | GetRequirements () |
| CommandGroup * | GetGroup () |
| void | SetRunWhenDisabled (bool run) |
| bool | WillRunWhenDisabled () |
| int | GetID () |
| virtual std::string | GetName () |
| virtual void | InitTable (ITable *table) |
| virtual ITable * | GetTable () |
| virtual std::string | GetSmartDashboardType () |
| virtual void | ValueChanged (ITable *source, const std::string &key, EntryValue value, bool isNew) |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Protected Member Functions | |
| virtual void | Initialize () |
| virtual void | Execute () |
| virtual bool | IsFinished () |
| virtual void | End () |
| virtual void | Interrupted () |
| Protected Member Functions inherited from Command | |
| void | SetTimeout (double timeout) |
| bool | IsTimedOut () |
| bool | AssertUnlocked (const char *message) |
| void | SetParent (CommandGroup *parent) |
| virtual void | _Initialize () |
| virtual void | _Interrupted () |
| virtual void | _Execute () |
| virtual void | _End () |
| virtual void | _Cancel () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
Additional Inherited Members | |
| Public Types inherited from Command | |
| typedef std::set< Subsystem * > | SubsystemSet |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Protected Attributes inherited from Command | |
| ITable * | m_table |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Detailed Description
Definition at line 12 of file WaitForChildren.h.
Member Function Documentation
|
protectedvirtual |
Called when the command ended peacefully. This is where you may want to wrap up loose ends, like shutting off a motor that was being used in the command.
Implements Command.
Definition at line 28 of file WaitForChildren.cpp.
|
protectedvirtual |
The execute method is called repeatedly until this Command either finishes or is canceled.
Implements Command.
Definition at line 24 of file WaitForChildren.cpp.
|
protectedvirtual |
The initialize method is called the first time this Command is run after being started.
Implements Command.
Definition at line 20 of file WaitForChildren.cpp.
|
protectedvirtual |
Called when the command ends because somebody called cancel() or another command shared the same requirements as this one, and booted it out.
This is where you may want to wrap up loose ends, like shutting off a motor that was being used in the command.
Generally, it is useful to simply call the end() method within this method
Implements Command.
Definition at line 32 of file WaitForChildren.cpp.
|
protectedvirtual |
Returns whether this command is finished. If it is, then the command will be removed and end() will be called.
It may be useful for a team to reference the isTimedOut() method for time-sensitive commands.
- Returns
- whether this command is finished.
- See Also
- Command::isTimedOut() isTimedOut()
Implements Command.
Definition at line 36 of file WaitForChildren.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:47 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.