Now you can download a copy of these docs so you can use them offline! Download now
Classes |
Public Types |
Public Member Functions |
Protected Types |
Protected Member Functions |
Protected Attributes |
Static Protected Attributes |
List of all members
ADXL345_SPI Class Reference
#include <ADXL345_SPI.h>
Inheritance diagram for ADXL345_SPI:
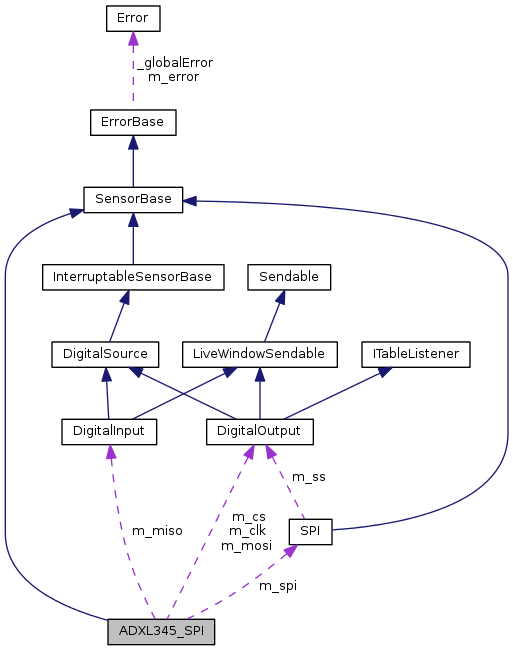
Collaboration diagram for ADXL345_SPI:
Classes | |
| struct | AllAxes |
Public Types | |
| enum | DataFormat_Range { kRange_2G =0x00, kRange_4G =0x01, kRange_8G =0x02, kRange_16G =0x03 } |
| enum | Axes { kAxis_X =0x00, kAxis_Y =0x02, kAxis_Z =0x04 } |
Public Member Functions | |
| ADXL345_SPI (DigitalOutput &clk, DigitalOutput &mosi, DigitalInput &miso, DigitalOutput &cs, DataFormat_Range range=kRange_2G) | |
| ADXL345_SPI (DigitalOutput *clk, DigitalOutput *mosi, DigitalInput *miso, DigitalOutput *cs, DataFormat_Range range=kRange_2G) | |
| ADXL345_SPI (uint8_t moduleNumber, uint32_t clk, uint32_t mosi, uint32_t miso, uint32_t cs, DataFormat_Range range=kRange_2G) | |
| virtual | ~ADXL345_SPI () |
| virtual double | GetAcceleration (Axes axis) |
| virtual AllAxes | GetAccelerations () |
 Public Member Functions inherited from SensorBase Public Member Functions inherited from SensorBase | |
| SensorBase () | |
| virtual | ~SensorBase () |
| Public Member Functions inherited from ErrorBase | |
| virtual Error & | GetError () |
| Retrieve the current error. Get the current error information associated with this sensor. | |
| virtual const Error & | GetError () const |
| virtual void | SetErrnoError (const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set error information associated with a C library call that set an error to the "errno" global variable. More... | |
| virtual void | SetImaqError (int success, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated from the nivision Imaq API. More... | |
| virtual void | SetError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | SetWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) const |
| Set the current error information associated with this sensor. More... | |
| virtual void | CloneError (ErrorBase *rhs) const |
| virtual void | ClearError () const |
| Clear the current error information associated with this sensor. | |
| virtual bool | StatusIsFatal () const |
| Check if the current error code represents a fatal error. More... | |
Protected Member Functions | |
| void | Init (DigitalOutput *clk, DigitalOutput *mosi, DigitalInput *miso, DigitalOutput *cs, DataFormat_Range range) |
| Protected Member Functions inherited from SensorBase | |
| void | AddToSingletonList () |
| Protected Member Functions inherited from ErrorBase | |
| ErrorBase () | |
| Initialize the instance status to 0 for now. | |
Protected Attributes | |
| DigitalOutput * | m_clk |
| DigitalOutput * | m_mosi |
| DigitalInput * | m_miso |
| DigitalOutput * | m_cs |
| SPI * | m_spi |
| Protected Attributes inherited from ErrorBase | |
| Error | m_error |
Static Protected Attributes | |
| static const uint8_t | kPowerCtlRegister = 0x2D |
| static const uint8_t | kDataFormatRegister = 0x31 |
| static const uint8_t | kDataRegister = 0x32 |
| static constexpr double | kGsPerLSB = 0.00390625 |
| Static Protected Attributes inherited from ErrorBase | |
| static SEM_ID | _globalErrorMutex = semMCreate(SEM_Q_PRIORITY | SEM_DELETE_SAFE | SEM_INVERSION_SAFE) |
| static Error | _globalError |
Additional Inherited Members | |
| Static Public Member Functions inherited from SensorBase | |
| static void | DeleteSingletons () |
| static uint32_t | GetDefaultAnalogModule () |
| static uint32_t | GetDefaultDigitalModule () |
| static uint32_t | GetDefaultSolenoidModule () |
| static bool | CheckAnalogModule (uint8_t moduleNumber) |
| static bool | CheckDigitalModule (uint8_t moduleNumber) |
| static bool | CheckPWMModule (uint8_t moduleNumber) |
| static bool | CheckRelayModule (uint8_t moduleNumber) |
| static bool | CheckSolenoidModule (uint8_t moduleNumber) |
| static bool | CheckDigitalChannel (uint32_t channel) |
| static bool | CheckRelayChannel (uint32_t channel) |
| static bool | CheckPWMChannel (uint32_t channel) |
| static bool | CheckAnalogChannel (uint32_t channel) |
| static bool | CheckSolenoidChannel (uint32_t channel) |
| Static Public Member Functions inherited from ErrorBase | |
| static void | SetGlobalError (Error::Code code, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static void | SetGlobalWPIError (const char *errorMessage, const char *contextMessage, const char *filename, const char *function, uint32_t lineNumber) |
| static Error & | GetGlobalError () |
| Static Public Attributes inherited from SensorBase | |
| static const uint32_t | kSystemClockTicksPerMicrosecond = 40 |
| static const uint32_t | kDigitalChannels = 14 |
| static const uint32_t | kAnalogChannels = 8 |
| static const uint32_t | kAnalogModules = 2 |
| static const uint32_t | kDigitalModules = 2 |
| static const uint32_t | kSolenoidChannels = 8 |
| static const uint32_t | kSolenoidModules = 2 |
| static const uint32_t | kPwmChannels = 10 |
| static const uint32_t | kRelayChannels = 8 |
| static const uint32_t | kChassisSlots = 8 |
Detailed Description
ADXL345 Accelerometer on SPI.
This class alows access to an Analog Devices ADXL345 3-axis accelerometer via SPI. This class assumes the sensor is wired in 4-wire SPI mode.
Definition at line 22 of file ADXL345_SPI.h.
Constructor & Destructor Documentation
| ADXL345_SPI::ADXL345_SPI | ( | DigitalOutput & | clk, |
| DigitalOutput & | mosi, | ||
| DigitalInput & | miso, | ||
| DigitalOutput & | cs, | ||
| DataFormat_Range | range = kRange_2G |
||
| ) |
Constructor.
- Parameters
-
clk The GPIO the clock signal is wired to. mosi The GPIO the MOSI (Master Out Slave In) signal is wired to. miso The GPIO the MISO (Master In Slave Out) signal is wired to. cs The GPIO the CS (Chip Select) signal is wired to. range The range (+ or -) that the accelerometer will measure.
Definition at line 27 of file ADXL345_SPI.cpp.
| ADXL345_SPI::ADXL345_SPI | ( | DigitalOutput * | clk, |
| DigitalOutput * | mosi, | ||
| DigitalInput * | miso, | ||
| DigitalOutput * | cs, | ||
| DataFormat_Range | range = kRange_2G |
||
| ) |
Constructor.
- Parameters
-
clk The GPIO the clock signal is wired to. mosi The GPIO the MOSI (Master Out Slave In) signal is wired to. miso The GPIO the MISO (Master In Slave Out) signal is wired to. cs The GPIO the CS (Chip Select) signal is wired to. range The range (+ or -) that the accelerometer will measure.
Definition at line 47 of file ADXL345_SPI.cpp.
| ADXL345_SPI::ADXL345_SPI | ( | uint8_t | moduleNumber, |
| uint32_t | clk, | ||
| uint32_t | mosi, | ||
| uint32_t | miso, | ||
| uint32_t | cs, | ||
| ADXL345_SPI::DataFormat_Range | range = kRange_2G |
||
| ) |
Constructor.
- Parameters
-
moduleNumber The digital module with the sensor attached. clk The GPIO the clock signal is wired to. mosi The GPIO the MOSI (Master Out Slave In) signal is wired to. miso The GPIO the MISO (Master In Slave Out) signal is wired to. cs The GPIO the CS (Chip Select) signal is wired to. range The range (+ or -) that the accelerometer will measure.
Definition at line 68 of file ADXL345_SPI.cpp.
|
virtual |
Destructor.
Definition at line 119 of file ADXL345_SPI.cpp.
Member Function Documentation
|
virtual |
Get the acceleration of one axis in Gs.
- Parameters
-
axis The axis to read from.
- Returns
- Acceleration of the ADXL345 in Gs.
Definition at line 139 of file ADXL345_SPI.cpp.
|
virtual |
Get the acceleration of all axes in Gs.
- Returns
- Acceleration measured on all axes of the ADXL345 in Gs.
Definition at line 158 of file ADXL345_SPI.cpp.
|
protected |
Internal common init function.
Definition at line 86 of file ADXL345_SPI.cpp.
The documentation for this class was generated from the following files:
Generated on Sat Apr 26 2014 12:26:45 for WPILibC++ by
 1.8.6
1.8.6
© 2006-2009 Dustin Spicuzza. All rights reserved.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.
Powered by Onnac
I do not condone or encourage graffiti. Please paint responsibly.